地球-月圏を舞台としたSFにおいて、宇宙ステーション、スペースコロニー、小天体といった構造物の係留場所・係留地として使えそうな軌道についてのメモ。必要があってまとめていたものだが、いまだ調査不足の点がいくつも残っている。いかんせん素人の記事ゆえに勘違いや間違いなどがあるかもしれないが、ご指摘をいただければその際は速やかに修正したい。
- 色々な係留軌道
- 月周回軌道
- ラグランジュ点
- リアプノフ軌道
- DRO(Distant Retrograde Orbit)
- NRHO(Near Rectilinear Halo Orbit)
- 月の共鳴軌道
- 関連用語メモ
- 参考
色々な係留軌道
地球周回軌道は当たり前すぎるので除外し、それ以外について書く。具体的には以下。
- 月周回軌道
- 地球-月系のラグランジュ点(ハロー軌道、リサジュー軌道)
- リアプノフ軌道
- DRO(Distant Retrograde Orbit)
- NRHO(Near Rectilinear Halo Orbit)
- 月の共鳴軌道
月周回軌道
月面からの高度100km未満の円軌道を月低軌道(Low Lunar Orbit;LLO)と呼ぶが、ほとんどの月低軌道は不安定である。なぜなら、月には重力が強く高密度と思われる質量集中地域(「mass concentration」から「マスコン」と呼ばれる)があり、重力分布にムラがあるためだ。衛星が80~100kmの上空を通過すると、このマスコンによって衛星が前後左右や下へと引っ張られる。だから月低軌道に置かれたほとんどの衛星は、軌道保持用の噴射をしなければ最終的に月へと衝突してしまう。ちなみに月低軌道の軌道周期は約2時間。
以下はNASAの月探査機GRAILによる月の重力異常分布図。地表面岩石による引力の影響を取り除く補正を行ったもの(これをブーゲー重力異常図と呼ぶ)で、地殻やマントルの密度の違いに伴う月内部の質量異常が分かる。赤くなっている円形箇所がマスコンである。
Catalog Page for PIA16623: GRAIL's 'Bouguer' Gravity Moon Map - NASA Jet Propulsion Laboratory NASAの月探査機GRAILによる月の重力異常分布図

まだこの問題が知られていなかった1972年、アポロ16号の機械船から放出された小型衛星「PFS-2」は、近月点90km、遠月点130kmの軌道に投入された。しかしその軌道は急速に変化し、2週間程度で衛星の最接近時高度が10km以下まで落ちた。その後は高度48kmまで戻ったが長くは続かず、PFS-2は軌道を425周したのち、1972年5月29日に放出からわずか35日間で墜落してしまった。
EP-95 ON THE MOON WITH APOLLO 16 p62 - NASA History Division | NASA アポロ16号の小型衛星「PFS-2」

では安定する軌道はないのかというと、「月の凍結軌道(lunar frozen orbits)」と呼ばれる軌道が発見されている。凍結軌道というのは、長期間にわたって人工衛星の高度が各軌道の同じ点で一定に保たれる軌道のこと。軌道パラメータを慎重に選択することで、中心天体の形状(重力分布)からくる軌道の不安定化を最小限に抑えた軌道である。
月では軌道傾斜角(月の赤道面に対する軌道の傾き)が重要で、これを27度、50度、76度、86度にすると凍結軌道が成立して軌道が安定することが判明している。ちなみに、先のPFS-2は軌道傾斜角が11度という非常に不安定な軌道だった。そしてその前のアポロ15号でも同型の小型衛星「PFS-1」が放出されているが、こちらの軌道傾斜角は28度で、たまたま27度の凍結軌道の傾斜角に近かったため墜落まで1年半ほどかかっている(正確な墜落日は不明)。
また、月を高高度で周回する円軌道も不安定である。人工衛星を高度1,200km以上で周回する円軌道に入れると、軌道にもよるが、早ければ数十日以内に月面へ衝突するか、双曲線軌道で月から飛び去っていくことになる。これは、地球がその重力で人工衛星を引っ張り、軌道の形状を円から楕円へと変えてしまうためである。軌道傾斜角が39.6度未満で安定した円軌道は存在するが、赤道付近にいる時間が長いので極地観測には向いていない。
軌道傾斜角39.6度未満の月高軌道では、衛星の軌道面が上下にぐらつき、遠月点と近月点を結ぶ線が地球に鎖で繋がれたかのように引きずり回される。軌道の傾きが39.6度より大きくなると、この線は比較的固定された状態となり、通信衛星や航法衛星の軌道を安定させて定期的な軌道修正用の推進剤を最小限に抑えられるという。
2005年に高高度における凍結軌道が発見されており、離心率が約0.6の楕円軌道となる。これは月の南極に基地を置いた場合の通信衛星の軌道としても有望視されている。以下は、その軌道傾斜角51度の軌道上に3基の人工衛星を120度間隔で配置する案。各衛星は、月北極の上空700kmで近月点を通過し、12時間の軌道周期のうち8時間をかけて月南極上空の地平線上8,000kmを回る。こうすることで、衛星3基のうち2基が常に南極の月面基地からの見通し線内にいられる。
A New Paradigm for Lunar Orbits | Science Mission Directorate 月の凍結高軌道

以下は月に近い周回軌道の種類。
月に近い小さな軌道(2体関係)をまとめている図。 Ryan Whitley, Roland Martinez, "Options for Staging Orbits in Cislunar Space", Future In-Space Operations (FISO) Telecon Presentations, April 13, 2016
- 月周回低軌道(LLO)は高度100km程度の円軌道である。LLOは月面からのアクセスに適しており、極軌道の傾斜角では全球の着陸地点にアクセス可能。
- 月周回楕円軌道(Elliptical Lunar Orbit;ELO)は、たとえば短軸100km・長軸1万kmのような軌道で、軌道への投入コストと月面への遷移コストを交換する(軌道が高い方が地球からの投入コストが安くなる上、近月点では月面からのアクセスもよい)。
- 順行円軌道(Prograde Circular Orbits;PCO)は順行方向に回る様々なサイズの円軌道で、非常に安定しており軌道修正の必要がほとんどない。
- 月凍結軌道は似ているが円形である必要はなく、固定値の周りで振動する軌道パラメータを持っている。

ラグランジュ点
言わずと知れたスペースコロニーの設置場所候補。解説は検索すれば日本語でもたくさん出てくるので省く。地球-月系以外にもラグランジュ点は存在するので注意。地球-月系ラグランジュ点は「Earth-Moon Lagrange points」なので、略して「EML」とも書く。例えば地球-月系の第五ラグランジュ点は「EML5」などと表記される。

上のような図でよく解説されるが、実際にはこの5つあるラグランジュ点(L点)にピンポイントで留まれるわけではなく、その点の近傍を周回する軌道となり、「ハロー軌道」や「リサジュー軌道」という名が付いている。そしてこれらは「疑似軌道(pseudo-orbit)」と呼ばれている。なぜなら実際には月と同じく地球を公転する軌道にあるが、各L点付近で地球を公転するため、地球からは各L点周囲を公転しているように見える軌道だからである。
こちらはL点周りの軌道がなぜ「疑似」軌道なのかがよく分かる動画。太陽-地球系のL2点についてだが、地球-月系でも基本的な動きは一緒。
ともあれ、それがどんな形状の軌道なのか、ということについては、野田司令が各L点周りのハロー軌道を可視化した解説ページを公開してくれている。以下はそのキャプチャ画像だが、見やすいように背景色や明るさ・コントラスト等を変更した。各L点を赤い線が何重にも取り巻いているが、それぞれが各点を周回する異なった半径を持つハロー軌道である。
ラグランジュ・ポイント - マツド・サイエンス研究所 地球-月系の各ラグランジュ点周りのハロー軌道

L4とL5は比較的安定しているため、スペースコロニーの設置場所としてよく挙げられる。それに対してL1~L3はそこまで安定性が高くなく、頻繁に軌道制御しないと軌道から外れてしまう。
L1~L3は南北に広がり、以下のように月の公転面(白道)を横から見た場合には、かなりはみ出すかたちとなる。南北に10万km以上ある軌道も成立する。余談だが『機動戦士ガンダム』において、ジオン公国のあるサイド3のL2軌道は、南北に広がる長軸が約12万km、横幅約8万kmという設定らしい。
ラグランジュ・ポイント - マツド・サイエンス研究所 月の公転面を横から見た際の、各ラグランジュ点周りのハロー軌道

各点周りの軌道周期だが、L3~L5は月の公転周期(27日)とほぼ同じとなり、L1とL2はその約半分の周期となる(※L4とL5の周期が89日という資料もあったのだが、詳しい方に教えてほしい)。また、北極方向から見下ろすと、各点周りの軌道はすべて右回りとなっている(月の自転と逆向き)。そして、各L点では北側と南側の2つのハロー軌道が存在できる(※南側でも北からみて右回りになるのかは未確認)。月軌道は円形ではなく離心率0.0549とわずかに楕円形であるため、実際は地球までの距離が近地点と遠地点で異なり、L点までの距離もそれに従って変化する。例えば月が近地点にきたときのL2は、遠地点のときよりも約10,000km月に近くなるらしい。
Zeng, H., Zhang, J., "Design of impulsive Earth-Moon Halo transfers: lunar proximity and direct options." Astrophysics and Space Science, 361: 328 (2016). 地球-月系L1・L2点周辺のハロー軌道群。内側のほうが南北(垂直)方向の振幅が小さい。

以下は地球-月系L2点周りのハロー軌道から月と地球を眺めた際の映像。要するにサイド3(ジオン公国)からの眺めである。
こちらは逆に地球からL2ハロー軌道を眺めた図。その軌道が月を取り巻く暈(かさ;halo)のように見えることから「ハロー軌道」と名付けられた。
R. W. Farquhar, "The Utilization of Halo Orbits in Advanced Lunar Operations," NASA-TN-D-6365, 1971. L2ハロー軌道に置かれた通信衛星を地球から眺めた図

一方のリサジュー軌道の形状はというと、よく「リサジュー図形」を描くと言われるが、以下の動画が分かりやすかった。
以下の図は地球-月系L2点周辺の周期軌道・準周期軌道例を示したもので、A:リサジュー軌道、B:ハロー軌道、C:8の字状のリサジュー軌道、D:平面リアプノフ軌道。なお平面リアプノフ軌道というのは後ほど取り上げるが、2天体がなす平面内に存在する、その秤動点周りを巡る軌道。この場合でいうと南北にはみ出すハロー軌道やリサジュー軌道とは異なり、月の公転面上でL点を周回する軌道となる。
S. Lizy-Destrez, et al., "Rendezvous Strategies in the Vicinity of Earth-Moon Lagrangian Points", Frontiers in Astronomy and Space Sciences, 5:45, 2019. 地球-月系L2点周辺の周期軌道の例

こちらは地球-月系ではなく太陽-地球系L2点のリサジュー軌道とハロー軌道だが、基本的な形状は変わらないはずなので参考用に。黄色が位置天文衛星ガイアのリサジュー軌道、青と緑がそれぞれジェイムズ・ウェッブ宇宙望遠鏡とユークリッド宇宙望遠鏡のハロー軌道である。
現実では、かつて1990年代に日本の工学実験衛星「ひてん(MUSES-A)」が地球-月系L4・L5点の周囲を通過してダスト観測を行ったことはあるものの、L点周りに留まることはなかった。2007年に磁気圏研究を目的としたNASAのコンステレーション観測衛星「テミス(THEMIS)」5基(名称はTHEMIS A~E)が打上げられた。その後ミッションの延長が決まって5基のうち2基が月軌道へと送られることとなり、こちらのミッション名は「アルテミス(ARTEMIS)」に変更された。THEMIS Bが「ARTEMIS P1」、同じくCが「ARTEMIS P2」と改称され、地球-月系のラグランジュ点や太陽風プラズマ、月と地球の磁場の相互作用などを研究するために月へ向かった。
そして2010年8月25日に1基目「ARTEMIS-P1」が地球-月系のL2点周りのリサジュー軌道へ入り、2ヶ月後の10月22日には2基目「ARTEMIS-P2」が同L1点周りのリサジュー軌道へ入った。宇宙機が地球-月系L点周りの軌道にきちんと投入され周回し続けたのはこの2基が初。その後L点での観測を終えた2基は2011年に月周回軌道へと移り、月を互いに反対方向へ回る軌道をとった。L点から月軌道への宇宙機の移動もこれが初である。
以下はARTEMIS-P1によるL1・L2点周りのリサジュー軌道を天の北極から(左)と月公転面の横から(右)見た図である。ARTEMIS-P1はL2点周りの軌道から途中でL1点周りへの軌道へと移動した。
D. Folta, M. Woodard, and D. Cosgrove, “Stationkeeping of the First Earth-Moon Libration Orbiters: The ARTEMIS Mission,” AAS/AIAA Astrodynamics Specialist Conference, 2011.

以下の動画において、赤がARTEMIS-P1の軌跡、緑がARTEMIS-P2の軌跡である(月を中心とした慣性座標系)。リサジュー軌道を巡ったのち、L2点を周っていたP1がL1点周りの軌道へ移り、そして互いに逆方向へ回る月周回軌道へと遷移する。
また、2019年に月の裏側に着陸した中国の月探査機「嫦娥4号」のデータ中継用として、常に月の裏側が見えていながら同時に地球も見えるL2ハロー軌道が採用された。中継用通信衛星「鵲橋(じゃっきょう;鹊桥)」が2018年にL2周りのハロー軌道へ投入され、地球-月系のL2点を周回する世界初の通信衛星となった。そもそも地球-月系L2点のハロー軌道はアポロ計画当時、以下の図のように月の裏側へ着陸した際の通信中継用として活用が提案されていたのだが、それが21世紀になり「鵲橋」で初めて実現したわけである。なおハロー軌道は中国語で「暈軌道(晕轨道)」と呼ぶらしい。
R. W. Farquhar, "The Utilization of Halo Orbits in Advanced Lunar Operations," NASA-TN-D-6365, 1971. L2ハロー軌道の通信衛星を介した月の裏側との通信

その他、地球-月系のラグランジュ点には怪しいネタとしてコーディレフスキー雲という話もあるのだが、あまり使いどころがない。
コロニー落とし
これまた余談だが、ラグランジュ点からのコロニー落としについては福江純氏の考察が以下のページと書籍にあるので参考になる。
前者Webページの一番下に2つ計算結果が出ており、下から2番目は17.128日、一番下はこのページに書かれていないが9.45日である。後者の書籍の最終章で確認できる。なお、これは初速度だけを与えて地球へ落下させた場合で、長期間の加速や軌道調整はしていない前提である。
リアプノフ軌道
リアプノフ軌道には垂直リアプノフ軌道(縦リアプノフ軌道)と平面リアプノフ軌道がある。平面リアプノフ軌道は、2天体がなす平面内に存在する、その秤動点周りを巡る軌道なので、要するに月の公転面上でL点を周回する軌道となる。リアプノフ軌道やリアプノフ安定については今回調べていて初めて知ったので、詳しい方による解説を欲している状態である。
以下は地球-月系のL1・L2両点における垂直リアプノフ軌道と平面リアプノフ軌道の例を示した動画。
以下は、ハロー軌道とリアプノフ軌道の比較動画。
以下は、地球-月系のL2点における垂直リアプノフ軌道から月と地球を眺めた際の映像。南北に細長く伸びた軌道から見ているため、こうなる。
以下は、地球-月系のL2点における平面リアプノフ軌道から月と地球を眺めた際の映像。地球と月がなす平面、つまり月の公転面上でL点を周回しているのがよくわかる。
DRO(Distant Retrograde Orbit)
L1・L2の両点を取り囲むほど大きな、そして安定性の高い月周回軌道で、月の公転面上にあって月の自転と逆向きに回る。訳語はないが直訳すると「遠方逆行軌道」か。安定して回り続けることができるため、推進剤による軌道保持の制御があまりいらないらしい。高度7万kmで周期は2週間。もっと大きな軌道もある。中止となったNASAのAsteroid Redirect Missionでは、以下の動画にあるように、運搬してきた小惑星を係留する軌道として検討されていた。
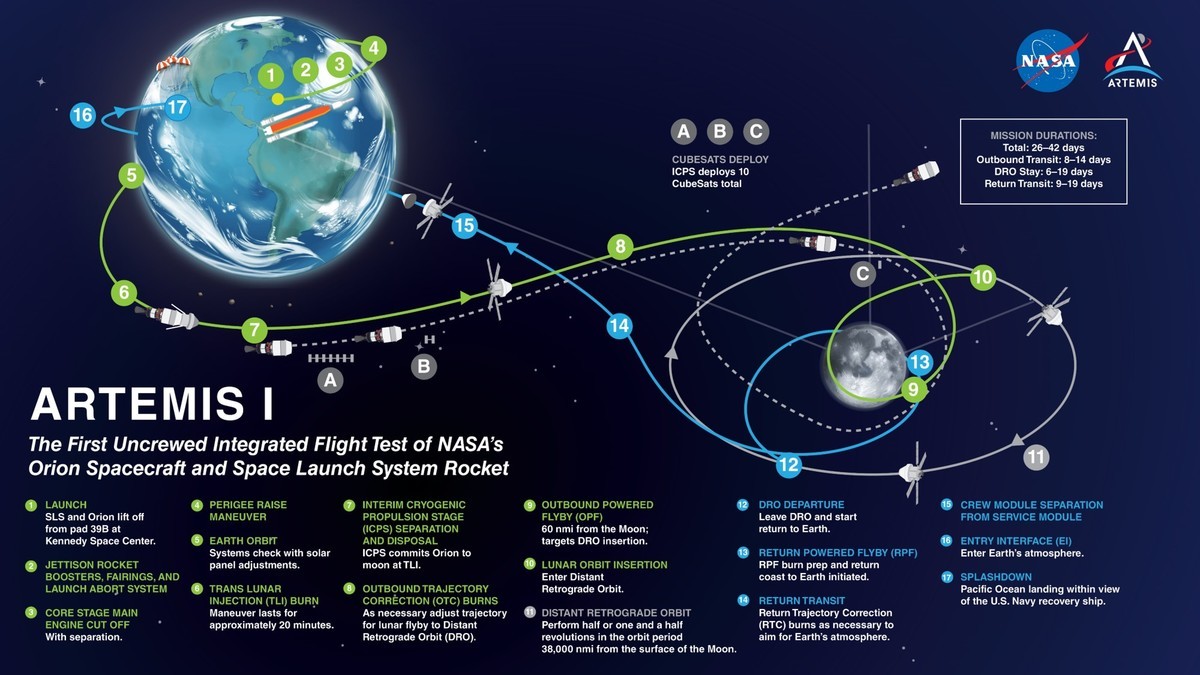
また、2022年に打上げ予定のSLSとオリオン宇宙船を使った無人の「アルテミス1号」ミッションでは、オリオンが約6~19日間に渡って高度7万kmのDROに乗ることになっている。
Artemis I Map | NASA アルテミス1号ミッションの概要図
以下の図の上部には各L点周りのリアプノフ軌道とDROが描かれている(地球-月の回転座標系)。下部はそのL1とL2周りの軌道をハロー軌道に変えたものである。L1・L2周りのリアプノフ軌道およびハロー軌道を取り囲んでいる大きな軌道がDROである。
Generated by J. Aziz / G. E. Pollock IV, J. A. Vedda, "Cislunar Stewardship: Planning for Sustainability and International Cooperation", The Aerospace Corporation's report, 2020.

こちらは地球-月系のDRO群(英語だと「family」と呼ぶ)。黒い点が地球で、DROの中心が月。Aをもっと外側に拡大したものがB。
S. Lizy-Destrez, et al., "Rendezvous Strategies in the Vicinity of Earth-Moon Lagrangian Points", Frontiers in Astronomy and Space Sciences, 5:45, 2019.

以下は地球低軌道からDROへの遷移軌道の例。
Rodgers, E. M. et al., "Multigenerational Independent Colony for Extraterrestrial Habitation, Autonomy, and Behavior health (MICEHAB): An investigation of a long duration, partial gravity, autonomous rodent colony" (2015)

追記:以下はリアプノフ軌道とDRO、リサジュー軌道、ハロー軌道、そして安定・不安定多様体(manifold;マニフォールド)についての、 航空宇宙工学の専門家(佐原宏典氏)による投稿。
【軌道力学のお話・第11話】太陽系に回廊があるんだって?!そう,惑星間輸送ネットワーク.難しい名前だね.今からお前のルート66だ!ってことで「太陽系内ルート66」だよ♪円制限三体問題からラグランジュ点とその周りの疑似軌道,そして弾道捕獲♪
— 宇宙システム研究室@東京都立大学 (@TMU_SSL) February 18, 2023
第1話~第10話https://t.co/X1nNh8MII7#TMU_SSL pic.twitter.com/UzLjWUMcDp
NRHO(Near Rectilinear Halo Orbit)
南北方向へ細長く伸びている月周回軌道。直訳すると「ほぼ直線的なハロー軌道」となり、つまりはハロー軌道の一種である。安定性は高いが、何もしなければ数年間で軌道から外れるので軌道保持は必要。DROと比べると軌道投入に必要なエネルギーが比較的少なく済むらしい。月軌道プラットフォームゲートウェイの設置場所として利用が検討されている。月面からの高度3,000~70,000kmで、軌道周期は約7日間。月面-ステーション間の輸送は最接近時を利用するので、ウィンドウは約7日ごとに開くことになる。これもハロー軌道と同様、南北に2つ存在できる。
以下は南北2つのNRHOの例。DROと「フラットなL2ハロー軌道」も一緒に描かれているが、フラットなハロー軌道ということはリアプノフ軌道なのではないかとも思う(詳しい方に教えてほしい)。
Steven L. McCarty, Laura M. Burke, Melissa L. McGuire, "Analysis of Cislunar Transfers from a Near Rectilinear Halo Orbit with High Power Solar Electric Propulsion" (2018)

以下はaがL1とL2の周りのハロー軌道の例で、bが同じくNRHOとDROの例。DROが両点の幅よりも小さいのが気になるのだが、あり得るのだろうか(詳しい方に教えてほしい)。
Oshima, K., "The use of vertical instability of L1 and L2 planar Lyapunov orbits for transfers from near rectilinear halo orbits to planar distant retrograde orbits in the Earth–Moon system", Celestial Mechanics and Dynamical Astronomy, 131, 14 (2019).

以下は月軌道ゲートウェイで検討されているNRHOの動画。特に二番目の動画ではハロー軌道とDROも絡めてグラフィカルに解説されており、おすすめ。
以下は、月中心の慣性系で見た4:1共鳴のNRHOと月低軌道。
4:1 resonant Near Rectilinear Halo viewed in the Moon-centered inertial frame...with a low lunar orbit in there for good measure.
— Diane Davis (@dianecraigdavis) January 25, 2018
I think I'll bring these guys with me to @devnexus. pic.twitter.com/BV1afmfSvs
以下は、これまで出てきた軌道をわかりやすく1枚にまとめてある図。NROというのはNRHOと同じだろう。
NROを中心として、先行研究文献と新規解析の両方から合計7種の軌道を検討した。すべての軌道について網羅的な分析ではないが、一般化された結論が得られるように傾向と特徴を計算した。Ryan Whitley, Roland Martinez, "Options for Staging Orbits in Cislunar Space", Future In-Space Operations (FISO) Telecon Presentations, April 13, 2016

NASA「アルテミスIV」のミッションプロファイル図(2022年4月版)が出ていたので紹介しておく。NRHO-月低軌道間の遷移軌道などがよく分かる。なお同様の図は「アルテミスV」についても出ている(2023年5月版)。
NASA National Aeronautics and Space Administration, Public domain, via Wikimedia Commons

月の共鳴軌道
これは簡単に言うと、地球と月の間にあり、月の軌道周期のちょうど半分で地球を回る軌道。先の野田司令によるラグランジュ点解説ページで少し触れられていた。
月の自転周期と月の地球周りの公転周期は同じなので1:1だが、このように天体の運動について、ある周期とある周期が簡単な整数比になっていることを尽数関係(commensurability)といい、さらに中心天体の周りを公転する2天体の公転周期の比が尽数関係となっている状態を、平均運動共鳴と呼ぶ。
つまり、地球と月の間にあり、月の軌道周期のちょうど半分で地球を回る軌道の物体をαとすると、月とαは2:1の尽数関係にあり、さらに平均運動共鳴をしているということになる。この軌道はラグランジュ点よりも安定性が高い。
月の平均公転半径は38万4,400kmで、地球半径6,371kmを引くと、軌道高度は37万8,029km。月の公転周期が27日7時間43分なので、このちょうど半分ということは13日15時間51分の公転周期で、仮に円軌道とすると軌道高度は23万5,000kmになる。もちろん整数比になればよいので月の軌道周期の3分の1倍となる軌道でもよい(はず)。
以下は、やはり野田司令による記述を読んだ方による、宇宙開発ゲーム『Kerbal Space Program』に「Real Solar System」と「Principia」というMODを入れて現実と同様にした環境でシミュレーションした動画。
なお、2018年に打上げられたトランジット系外惑星探索衛星(TESS)は、まさに月軌道のちょうど半分に相当する平均13.65日(実際には12.8〜14.6日の間)の周期で地球を周回している。軌道離心率は0.55と大きめで、軌道傾斜角は37度である。
この2:1の月共鳴軌道は「P/2」もしくは「P/2-HEO」と呼ばれており、P/2というのは「月軌道周期(Period)の2分の1」を意味する。だからもし月軌道周期の3分の1(月と3:1の共鳴軌道)であれば「P/3」となる。HEOは「High Earth Orbit(地球高軌道)」の略だが、同時に「Highly Elliptical Orbit(長楕円軌道)」の略でもあるようだ。
TESSの近地点高度は10万8,000km、遠地点高度が37万5,000kmで、これが月から約90度離れた位置にあるため、月の摂動で軌道が不安定になる影響を最小限に抑えられる。おかげで軌道維持用の推進剤を使わずに何十年も安定する軌道となり、観測用のCCDカメラを一定の熱環境に保てるようだ。さらには北天と南天を遮られずに観測できる。軌道自体はヴァン・アレン帯の外側に位置するが、これは機器への放射線障害を避けるためである(ヴァン・アレン帯の外帯は高度1万~2万km)。
以下はTESSの投入軌道図だが、月スイングバイを使って最終的な軌道へと投入している。図中の「PLEA」は「Post-Lunar-Encounter-Apogee(月遭遇後の遠地点)」、「PLEP」は「Post-Lunar-Encounter-Perigee(月遭遇後の近地点)」のことで、「 」は地球半径のこと。
Operations - TESS Science Support Center

{kind=link}
関連用語メモ
- Cislunar(シスルナ):ラグランジュ点を含む、地球の大気圏外で月軌道のすぐ先まで広がる領域のこと。「cis」はラテン語の前置詞に由来する「on this side of」という意味なので、語義的には「月のこちら側」という言葉である。この領域はだいたい「Cislunar Space」と呼ばれる。この手のネタで検索していると頻繁に遭遇するが、上手い訳語がない。JAXAの記事などでは「シスルナ空間」とカタカナ表記されていたりする。ガンダムシリーズの「地球圏」が意味として近いのだが、学術分野で使われる「地球圏」とは意味が違うので紛らわしい。個人的には「地球-月圏」と訳している。
- なお地球周辺の宇宙空間のことは「Circumterrestrial Space」とも呼ぶらしいが、それよりもよく使われているのは「Near-Earth Space」のほうである。それらとは別に「Geospace」という用語もあるが、これは「上層大気、電離層、磁気圏を含む、地球近傍の宇宙空間」という意味で、主として地球周辺環境の観測などで使われることが多い。
- ロッシュ限界:その内側では主天体の潮汐力によって衛星など天体が破壊されてしまう範囲のこと。例えばWikipedia英語版には、地球に平均的な彗星が近づいた場合のロッシュ限界は剛体の場合で17,887km、流体の場合で34,638kmとあったので、おおよそ2~3万kmという、静止軌道より内側で破壊されるといえる。創作の際には、小天体をこのような位置にうっかり置くような設定にすると面倒なことになる。なお、ロッシュ限界は重力からくる潮汐力によるものなので、構成物質がそれに耐えられれば破壊されることはない。そして破壊される際は以下の動画のようになる。東工大の河合誠之氏の解説も参考に。
An icy moon approached close to, or even just inside the planet’s Roche limit. As Saturn’s immense tidal gravitational forces acted across the moon, it began to rupture#ThePlanets pic.twitter.com/wQbo08xCfd
— BBC Earth (@BBCEarth) June 18, 2019
潮汐力は、重心を結んだ直線上に働くので、円軌道だったら、軌道に垂直な方向に働きます。しかし、一旦、分解すると、衛星に近い破片はケプラー速度が速いために本体より先行し、逆に惑星から遠い方は遅れます。したがって、あたかも軌道の前後に伸びるように見えます。
— Nobuyuki Kawai (@NobuKawai) July 2, 2020
参考
月周回軌道
- 重力異常 - Wikipedia
- Lunar orbit - Wikipedia
- Q&A: Lowest Possible Lunar Orbit – SKY LIGHTS
- Bizarre Lunar Orbits | Science Mission Directorate
- Frozen orbit - Wikipedia
- Apollo 16 Subsatellite | NASA - NSSDCA - Spacecraft - Details
- PFS 1, 2 - Gunter's Space Page
- A New Paradigm for Lunar Orbits | Science Mission Directorate
ラグランジュ点
- ラグランジュ・ポイント - マツド・サイエンス研究所
- ラグランジュ点の安定性を調べてみた - 三宅雄紀 - 京大防災研
- 地球-月系L2点ハロー軌道周回衛星「颯」 - 第24回衛星設計コンテスト
- In Depth | ARTEMIS – NASA Solar System Exploration
- ARTEMIS Spacecraft Prepare for Lunar Orbit | NASA
- GMS: ARTEMIS Orbits Magnetic Moon - NASA
- SVS: ARTEMIS Mission - NASA
- SVS: ARTEMIS at Lagrange - NASA
- SVS: ARTEMIS at Lagrange: The View from Above - NASA
- orbital mechanics - Rendezvouses in halo or lissajous orbits - Space Exploration Stack Exchange
- THEMIS - Wikipedia
- リアプノフ安定 - Wikipedia
- ホモクリニック軌道 - Wikipedia
- ラグランジュ点に存在する物体の一覧 - Wikipedia
- Queqiao’s Earth-Moon L2 Halo Orbit – Riddles in the Sky
- How China's lunar relay satellite arrived in… | The Planetary Society
- 嫦娥4号の月の裏側探査 宇宙での国際協力さらに - 人民中国
- “鹊桥”中继星顺利进入使命轨道运行 - 国家航天局
- 嫦娥四号:“鹊桥”早在那儿等着你 - 国家航天局
- 嫦娥四号任务-中国探月工程概览
- 嫦娥四号任务-“嫦娥”成功落月 “鹊桥”功不可没
- 地球を周回する新たな天体を確認、月とは別 | ナショナルジオグラフィック日本版サイト
- 近傍運用シナリオの検討 – MMX Mission News
- 準衛星 - Wikipedia
- Interplanetary Transport Network - Wikipedia
- ESA Television - Videos - 2023 - 07 - Webb and Gaia welcome Euclid to L2
- 永瀬唯,「GUNDAM UNIVERSE U.C.SCIENCE」, 『MOBILE SUIT GUNDAM THE MOVIES III『機動戦士ガンダム・めぐりあい宇宙』劇場用アニメ映画第3作 フィルムコミック』, 旭屋出版, (1997), pp.266-273.
DROとNRHO
- Distant retrograde orbit - Wikipedia
- Orion Will Go the Distance in Retrograde Orbit During Artemis I | NASA
- A unique halo orbit is the road less traveled around the Moon | NASA
- ESA - Angelic halo orbit chosen for humankind’s first lunar outpost
- Diane Davis, et al., "Orbit Maintenance and Navigation of Human Spacecraft at Cislunar Near Rectilinear Halo Orbits" in 27th AAS/AIAA Space Flight Mechanics Meeting, San Antonio, Texas, February 5-9, 2017.
- Sample Near-Rectilinear Halo Orbits (NRHOs) | The Planetary Society
- 月経由、火星行き - 人類の新たなる前哨基地「深宇宙ゲートウェイ」計画 (1) あるときは月を回る宇宙ステーション、またあるときは火星往還船 | マイナビニュース
- Around the Moon with NASA’s First Launch of SLS with Orion | NASA
月の共鳴軌道
- 天文学辞典 » 尽数関係
- 天文学辞典 » 平均運動共鳴
- 軌道共鳴 - Wikipedia
- 古在メカニズム - Wikipedia
- 打ち上げに成功したNASAの新探査衛星は、地球の近くに「生命が存在できる星」を見つけられるか | WIRED.jp
- NASA、トランジット系外惑星探査機「TESS」初回ミッションを終了 =新たに惑星66個と惑星らしきもの2,100個を発見= | TOKYO EXPRESS
- Operations - TESS Science Support Center
- The TESS Science Writer’s Guide - TESS Media Resources | NASA
- TESS Looks for Exoplanets | The Aerospace Corporation
- TESS Orbit Design – TESS | Spaceflight101
- orbital mechanics - TESS orbit and moon resonance - Space Exploration Stack Exchange
- orbital mechanics - Why does Earth not appear to be at the focus of TESS' elliptical orbit in this video? - Space Exploration Stack Exchange
- New Explorer Mission Chooses the ‘Just-Right’ Orbit | NASA
- Three-body dynamics in the TESS orbit - News for scientists - TESS
- D. McGiffin, M. Mathews and S. Cooley, "High Earth Orbit Desing for Lunar Asisted Medium Class Explorer Missions," in Flight MEchanics Symposium, Greenbelt MD, 2001.
- Joseph W. Gangestad, Gregory A. Henning, Randy R. Persinger, George R. Ricker, "A High Earth, Lunar Resonant Orbit for Lower Cost Space Science Missions" in AAS/AIAA Astrodynamics Specialist Conference, August 2013.
- Donald J. Dichmann, Joel J. K. Parker, Trevor W. Williams, Chad R. Mendelsohn, "Trajectory Design for the Transiting Exoplanet Survey Satellite" in International Symposium on Spacecraft Flight Dynamics, Laurel MD, May 2014.
- Donald Dichmann, Joel Parker, Craig Nickel, Stephen Lutz, "Trajectory Design Enhancements to Mitigate Risk for the Transiting Exoplanet Survey Satellite (TESS)" in AIAA/AAS Astrodynamics Specialist Conference, Long Beach CA, September 2016.
最終更新日:2023-10-02